Control de Productos Mecatrónicos
El control hace parte de todo lo que nos rodea, empezando por la naturaleza la cual se autorregula generando equilibrio entre el numero de presas y depredadores. También existe control dentro de nuestro cuerpo, el cual es un sistema que autorregula la temperatura del cuerpo entre otras funciones automáticas. En la industria para mejorar indicadores tales como la productividad y la calidad se emplean herramientas automatizadas que nos ayudan a cumplir los estándares y objetivos.
El curso busca que ustedes como estudiantes sean capaces de:
- Diseñar controladores que automaticen máquinas.
- Optimizar dichos controladores.
- Implementar dichos controladores.
Compromiso: el curso de Control Automático de Producto Mecatrónicos tiene de 3 créditos, lo que corresponde a una intensidad horaria de 144 horas al semestre, de estas, 36 horas están dedicadas a las clases y 108 horas son de trabajo independiente. Por lo que los estudiantes se comprometen a trabar de forma independiente 8 horas semanales durante 13 semanas.
Cronograma
| # | Día | Hora | Tema | Enlaces | |
|---|---|---|---|---|---|
| 1 | 25 Enero | 06-09 | Introducción al Control | ||
| 2 | 1 Febrero | 06-09 | Modelizado de Sistemas | 💾 | 📝 |
| 3 | 8 Febrero | 06-09 | Análisis temporal | 💾 | 📝 |
| 4 | 15 Febrero | 06-09 | Estabilidad | 💾 | 📝 |
| 5 | 22 Febrero | 06-09 | Control PID | 💾 | 📝 |
| 6 | 1 Marzo | 06-09 | Modelizado Experimental | ||
| 7 | 8 Marzo | 06-09 | Seminario I | ✔️ | |
| 8 | 15 Marzo | 06-09 | Espacio de Estados | 💾 | 📝 |
| 9 | 12 Abril | 06-09 | Reto 2 - Pendulo de Furuta | ✔️ | |
| 10 | 19 Abril | 06-09 | Reto 1 - Presentación de brazo en ROS | ✔️ | |
| 11 | 26 Abril | 06-09 | Clase por parte de los estudiantes | ✔️ | |
| 12 | Mayo | 06-09 | Presentación del Proyecto | ✔️ | |
Los elementos con este símbolo ✔️ son actividades evaluativas.
Evaluación
Para evaluar el curso se seleccionarán 4 trabajos que deseen realizar los estudiantes y la nota será calculada apartir de estos, de la siguiente forma:
El sistema SIRENA no me permite poner una nota del 100% por lo que apareceran 2 notas cada una del 50%, la nota en ambas será la misma, igual a $N$. A elección podran escoger entre las siguientes opciones:
1. Seminario
Para los dos seminarios escoger un articulo de los congresos de hasta dos años anteriores:
- ICRA: International Coference on Robotics and Automation
- IROS: International Conference on Intelligent Robots and Systems
Para la presentación de los seminarios cada persona tendrá un tiempo de $15\text{min}$ para la presentación y $5\text{min}$ para preguntas. A los seminarios se invitarán estudiantes de pregrado de la Universidad. En la presentación a parte de presentar el articulo se debe presentar el o los laboratorios de donde provienen los autores. Durante toda la presentación se debe estar en el ROL de autor.
2. Clase
Cada estudiante debe preparar una clase de control con temas de control avanzado. La clase debe durar en total 40 minutos y dentro de ese tiempo deben proponer un ejemplo que los otros estudiantes del curso realicen. Algunos temas para las clases son:
- Control Fuzzy
- Control LQR
- Control con Redes Neuronales
3. Reto 1 : Brazo Robótico
El reto para este semestre consiste en simular un brazo robótico usando ROS y Gazebo basados en el trabajo realizado el semestre pasado por los estudiantes del curso. Se logra el reto en cuanto se llegué al mismo punto de los estudiantes del semestre pasado o se supere ampliamente los resultados anteriores.
Para lograr el objetivo podrán consultar la documentación y los vídeo tutoriales del grupo del semestre anterior.
4. Reto 2 : Simuladores
Construir un simulador en BabylonJS y controlar el modelo usando controladores aprendidos en el curso.
- Algunos simuladores pueden ser descargados aquí
- La documentación para Babylon puede ser consultada aquí
- Recomiendo hacer el simulador de un péndulo de furuta.
5. Proyecto 1 : Plataforma Móvil
Construir una pequeña plataforma móvil dotada de autonomía energética, que siga un apuntador láser, para conocer la posición del la plataforma y del láser harán uso de una cámara que calibrarán y en base a esta moverán de manera automática y remota el robot.
6. Proyecto 2 : Motion Planning
Hacer motion planning usando ROS al robot SCARA que se encuentra en la universidad siguiendo una secuencia de packing.
7. Propuestas
Escucho propuestas adicionales.
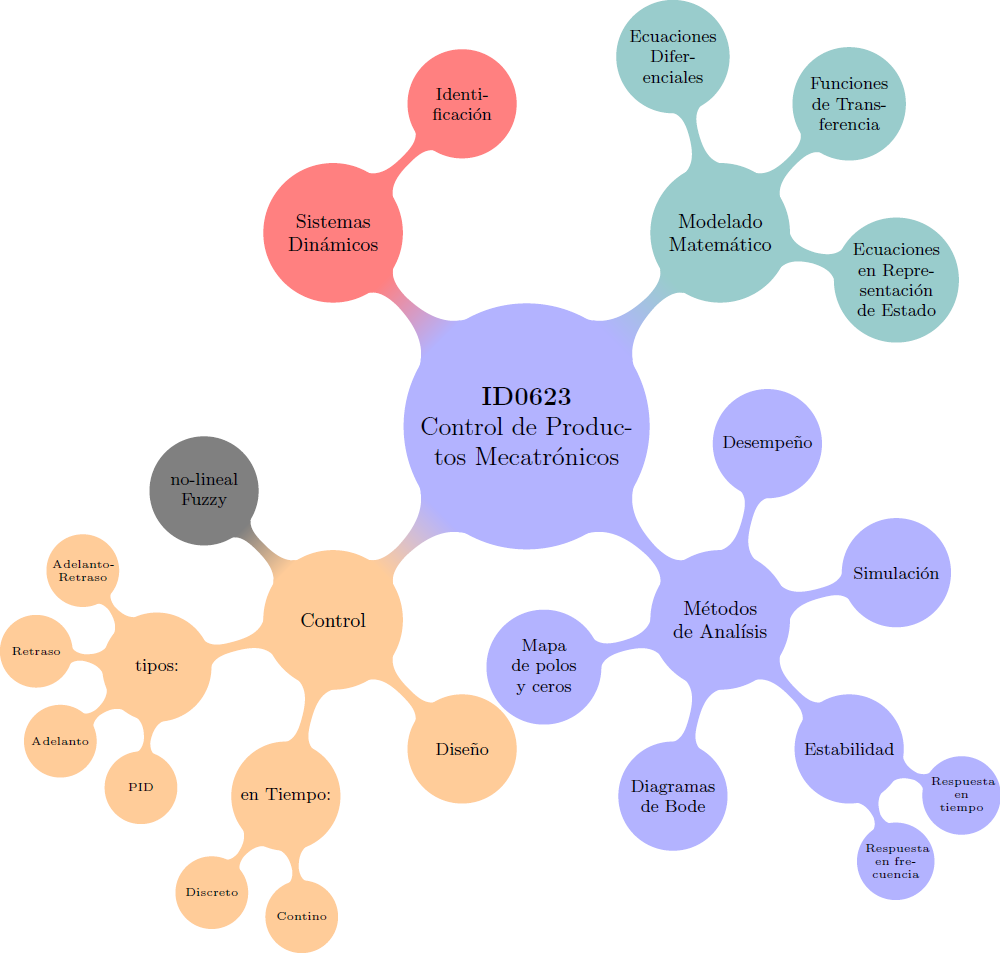
Mapa conceptual
Bibliografía
Aquí podrán encontrar una extensa colección de libros muy adecuado para profundizar los temas visto en la clase de control. Los libros están agrupados dependiendo de su temática. Inicialmente se presentan los libros básicos utilizados en la mayoría de cursos introductorios en control. Cada grupo esta ordenado por año del más reciente al más antiguo.
Básica
- R.H. Bishop & R.C. Dorf (2011). Sistemas de Control Moderno.
- Antonio Creus-Solé (2011). Instrumentación Industrial.
- Katsuhiko Ogata (2010). Ingeniería de Control Moderna.
- Benjamin C. Kuo (1996). Sistemas de Control Automático.
- L. Ljung & T. Glad (1994). Modeling of Dynamic Systems.
- Carlos A. Smith & Armando B. Corripio (1991). Control Automático de Procesos, Teoría y Práctica.
Control
- Ruben Morales & Ricardo A. Ramirez (2013). Sistemas de Control Moderno.
- Luis Moncada-Albitres (2005). Automatización y Control de Procesos.
- P.H. Lewis & C. Yang (1999). Sistemas de Control en Ingenieria.
- Katsuhiko Ogata (1996). Sistemas de Control en Tiempo Discreto.
- W.L. Luyben (1996). Process Modeling, Simulation and Control for Chemical Engineers.